No products
Prices are tax excluded
Product successfully added to your shopping cart
There are 0 items in your cart. There is 1 item in your cart.
 View larger
View larger


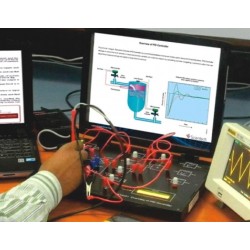
ACS-1000 Analog Control System
ACS-1000
New
ACS-1000, covered with many technical disciplines, explicates the central significance of Analog Control System. This applies particularly in mechanical and electrical engineering, and as well in production and process technology. It is indispensable to plant and system technology.
- Consulta este producto
- Remove this product from my favorite's list.
- Add this product to my list of favorites.
| Category | Analog and Digital Electronics |
| Function | Analog Electronics |
In the automation field, important optimization tasks would be quite impossible to be accomplished without closed-loop control technology. In line with its increasing importance, closed-loop control has become an essential subject in professional training and further education for many professions.
In the newly formulated training curriculum, this technology plays an important role covering a number of subjects in syllabuses for training in industry and the crafts.
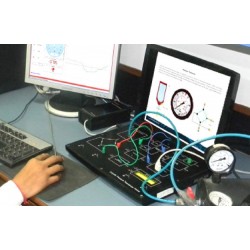
01. Control engineering is an exciting discipline. It offers the most expedite in way to learn system control for improving production processes. Electronic analog control and simulation have become the cornerstone of technological advancement. K&H provides ACS-1000 for students to observe the testing result of Proportional-Integral-Derivative (PID) controllers as well as phase-lag and phase-lead controllers.
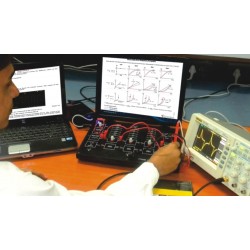
02. Modularized ACS-1000 is flexible enough to cater to the needs of all level learners to make related experiments.
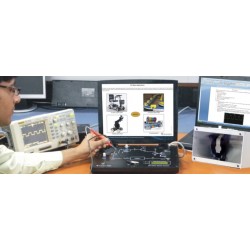
03. The whole control modules help students to understand control theory and application of hands-on motor control through our comprehensive and step-by-step teaching curriculums.
4. We also provide PC based data acquisition device as interface to facilitate data storage from computer.
01. Laplace transform experiment
02. System simulation experiment
03. Steady-state error experiment
04. First-order system experiment
05. Second-order system experiment
06. Transient response specifications experiment
07. Effects of zeros on first-order system experiment
08. Effects of zeros on second-order system experiment
09. Dominant pole of second-order system experiment
10. DC Servo motor characteristics experiment
11. Proportional controller experiment
12. P controller in DC servo motor speed / position control experiment
13. Integral controller experiment
14. I controller in DC servo motor speed / position control experiment
15. Derivative controller experiment
16. D controller in DC servo motor speed / position control experiment
17. Proportional-Integral (PI) controller experiment
18. PI controller in DC servo motor speed / position control experiment
19. Proportional-Derivative (PD) controller experiment
20. PD controller in DC servo motor speed / position control experiment
21. PID controller experiment (1) Ziegler-nichols method (1)
22. PID controller experiment (2) Ziegler-nichols method (2)
23. PID controller experiment (3) Position control
24. PID controller experiment (4) Speed control
25. Closed loop DC servo motor speed / position control with PID controller experiment
26. Inner-loop feedback control experiment
27. Phase lead compensators experiment (1) Root locus technique
28. Phase lead compensators experiment (2) Frequency domain design
29. Phase lag compensators experiment (1) Root locus technique
30. Phase lag compensators experiment (2) Frequency domain design
31. Phase lead-lag compensators experiment (1) Root locus technique
32. Phase lead-lag compensators experiment (2) Root locus technique
33. Phase lead-lag compensators experiment (3) Frequency domain design
34. Pole-zero cancellation experiment
35. State feedback pole assignment experiment
30 other products in the same category:
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech23...
-

ScientechIT...
-
Scientech24...
-

Scientech24...
-

Scientech24...
-
Scientech24...
-
Scientech24...
-

Scientech24...
-

Scientech23...
-

Scientech23...
-
Scientech23...
-

Scientech23...
-

Scientech23...
-
Scientech23...
-

Scientech23...
-

Scientech23...
-

Scientech23...
-

Scientech24...
-
Scientech24...
-

Scientech24...
-

Scientech24...
-
Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Nvis 6000...
550,00 €