Ningún producto
Estos precios se entienden sin IVA
Su producto se agregó correctamente al carro
Hay 0 productos en su carro. Hay 1 producto en su carro.
 Ver más grande
Ver más grande


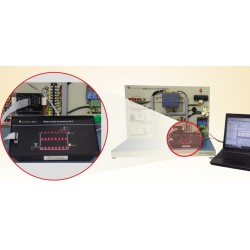
ACS-1000 Sistema de Control Analógico
ACS-1000
Nuevo
ACS-1000, cubierto con muchas disciplinas técnicas, explica la importancia central del sistema de control analógico. Esto se aplica particularmente en la ingeniería mecánica y eléctrica, y también en la producción y tecnología de procesos. Es indispensable para la tecnología de planta y sistema.
- Consulta este producto
- Remove this product from my favorite's list.
- Add this product to my list of favorites.
- Imprimir
| Categoría | Electrónica Analógica y Digital |
| Función | Electrónica Analógica |
En el campo de la automatización, las tareas de optimización importantes serían imposibles de lograr sin la tecnología de control de circuito cerrado. De acuerdo con su creciente importancia, el control de circuito cerrado se ha convertido en un tema esencial en la formación profesional y la educación superior para muchas profesiones.
En el plan de estudios de formación recientemente formulado, esta tecnología desempeña un papel importante que abarca una serie de asignaturas en los planes de estudios para la formación en la industria y la artesanía.
1. La ingeniería de control es una disciplina emocionante. Ofrece la forma más rápida de aprender a controlar el sistema para mejorar procesos de producción. El control analógico electrónico y la simulación se han convertido en la piedra angular de la tecnología adelanto. K&H proporciona ACS-1000 para que los estudiantes observen el resultado de las pruebas de los controladores de Derivados Integrales Proporcionales (PID) así como los controladores de desfase y fase-plomo.
2. El ACS-1000 modularizado es lo suficientemente flexible como para satisfacer las necesidades de todos los estudiantes de nivel para realizar experimentos relacionados.
3. Todos los módulos de control ayudan a los estudiantes a comprender la teoría de control y la aplicación de control de motor manual a través de nuestros currículos de enseñanza integrales y paso a paso.
4. También proporcionamos un dispositivo de adquisición de datos basado en PC como interfaz para facilitar el almacenamiento de datos desde la computadora.
01. Experimento de transformación de Laplace
02. Experimento de simulación del sistema
03. Experimento de error de estado estable
04. Experimento de sistema de primer orden
05. Experimento de sistema de segundo orden
06. Experimento de especificaciones de respuesta transitoria
07. Efectos de los ceros en el experimento del sistema de primer orden
08. Efectos de los ceros en el experimento del sistema de segundo orden
09. Polo dominante del experimento del sistema de segundo orden
10. Experimento de las características del motor servo DC
11. Experimento de controlador proporcional
12. Controlador P en el experimento de control de velocidad / posición del servomotor DC
13. Experimento de controlador integral
14. El controlador en el experimento de control de velocidad / posición del servomotor de CC
15. Experimento del controlador de derivadas
16. Controlador D en el experimento de control de velocidad / posición del servomotor DC
17. Experimento de controlador proporcional-integral (PI)
18. Controlador PI en el experimento de control de velocidad / posición del servomotor DC
19. Experimento de controlador de Derivación Proporcional (PD)
20. Controlador PD en el experimento de control de velocidad / posición del servomotor DC
21. Experimento del controlador PID (1) Método Ziegler-nichols (1)
22. Experimento del controlador PID (2) Método Ziegler-nichols (2)
23. Experimento del controlador PID (3) Control de posición
24. Experimento del controlador PID (4) Control de velocidad
25. Control de velocidad / posición del servomotor DC de bucle cerrado con el experimento del controlador PID
26. Experimento de control de retroalimentación de lazo interno
27. Experimento de los compensadores de la ventaja de la fase (1) Técnica del locus de la raíz
28. Experimento de compensadores de derivación de fase (2) Diseño de dominio de frecuencia
29. Experimento de compensadores de retardo de fase (1) Técnica de locus de raíz
30. Experimento de compensadores de retardo de fase (2) Diseño de dominio de frecuencia
31. Experimento de compensadores de adelanto de fase (1) Técnica de locus de raíz
32. Experimento de compensadores de adelanto de fase (2) Técnica de locus de raíz
33. Experimento de compensadores de adelanto de fase (3) Diseño de dominio de frecuencia
34. Experimento de cancelación de polo cero
35. Experimento de asignación de polos de realimentación del estado
30 otros productos en la misma categoría:
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech23...
-

ScientechIT...
-
Scientech24...
-

Scientech24...
-

Scientech24...
-
Scientech24...
-
Scientech24...
-

Scientech24...
-

Scientech23...
-

Scientech23...
-
Scientech23...
-

Scientech23...
-

Scientech23...
-
Scientech23...
-

Scientech23...
-

Scientech23...
-

Scientech23...
-

Scientech24...
-
Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Nvis 6000...
550,00 €