Ningún producto
Estos precios se entienden sin IVA
Su producto se agregó correctamente al carro
Hay 0 productos en su carro. Hay 1 producto en su carro.
 Ver más grande
Ver más grande


MTS-33T Sistema de Entrenador Inteligente Micro Ratón
MTS-33T
Nuevo
El MTS-33T les permite a los estudiantes realizar 3 tipos de experimentos de micro ratón en una mesa de laboratorio individualmente incluyendo solucionador de laberinto de pared, solucionador de laberinto de línea y seguidor de línea. Con la pared de laberinto, el poste y la plataforma de seguimiento de línea proporcionados, los estudiantes pueden configurar los entornos experimentales correspondientes de manera eficiente y flexible.
- Consulta este producto
- Remove this product from my favorite's list.
- Add this product to my list of favorites.
- Imprimir
| Categoría | Telecomunicaciones |
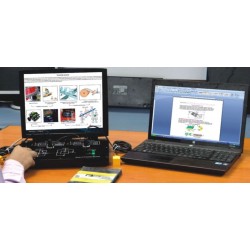
El aprendizaje de la programación de MCU para micro ratón es un tema de curso importante en MTS-33T. Los estudiantes pueden ver el comportamiento de micro ratón instantáneamente después de programar, descargar y ejecutar el código MCU.
El software de simulación proporcionado permite a los estudiantes crear el mapa del laberinto de líneas y el laberinto de pared para observar cómo el micro ratón resuelve el laberinto.
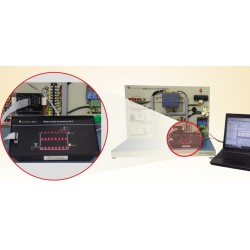
1. El entrenador está protegido por una maleta para facilitar su transporte y almacenamiento.
2. El entrenador puede actuar como un laberinto de pared resolviendo microrouse, laberinto de línea resolviendo micromouse y trazador de línea.
3. Adopta el tamaño estándar internacional de la pared de laberinto y línea de rastreo.
4. Apague automáticamente cuando haga una sobre-vuelta del micro ratón.
5. Conjuntos de sensores seleccionables para detectar cualquier condición de pared o condición de línea.
6. El entrenador incluye un chip dsPIC33F y circuitos periféricos (circuito de potencia, circuito del sensor, circuito de entrada / salida, etc.), lo cual es muy útil para comprender el conocimiento relacionado con el control del microprocesador.
1. Simulación de software MPLAB
2. Control del puerto de E / S digital
3. Control de pantalla LCD
4. Control de interrupción del temporizador y el temporizador
5. Módulo de comparación de salida
6. Control PWM
7. Módulo convertidor analógico a digital
8. Transmisor receptor asíncrono universal
9. Normalización de la señal infrarroja
10. Detección de línea
11. Pared después de la simulación del robot
12. Línea siguiendo la simulación del robot
13. Detección del estado de la carretera para seguimiento de línea de robot
14. Detección del estado de la carretera para la pared que sigue al robot
15. Control de seguimiento de línea
16. Codificador
17. Control PID (requiere MATLAB SIMULINK, opción)
18. Control de retroalimentación del codificador
19. Control de velocidad del motor
20. Control de posición del motor
21. Simulación de control de giro con micromulso (requiere MATLAB SIMULINK, opción)
22. Control de velocidad central Micro Ratón
23. Control de posición central Micro Ratón
24. Control de actitud de Micro Ratón
30 otros productos en la misma categoría:
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech23...
-

ScientechIT...
-
Scientech24...
-

Scientech24...
-

Scientech24...
-
Scientech24...
-
Scientech24...
-

Scientech24...
-

Scientech23...
-

Scientech23...
-
Scientech23...
-

Scientech23...
-

Scientech23...
-
Scientech23...
-

Scientech23...
-

Scientech23...
-

Scientech23...
-

Scientech24...
-
Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Scientech24...
-

Nvis 6000...
550,00 €